yl7703永利官网研究成果被机器人领域顶级会议ICRA 2024录用
近日,yl7703永利官网金龙教授团队指导研究生刘堃的研究工作“Robust and Remote Center of Cyclic Motion Control for Redundant Robots with Partially Unknown Structure”被机器人领域国际顶级会议2024 IEEE International Conference on Robotics and Automation(ICRA)会议录用。
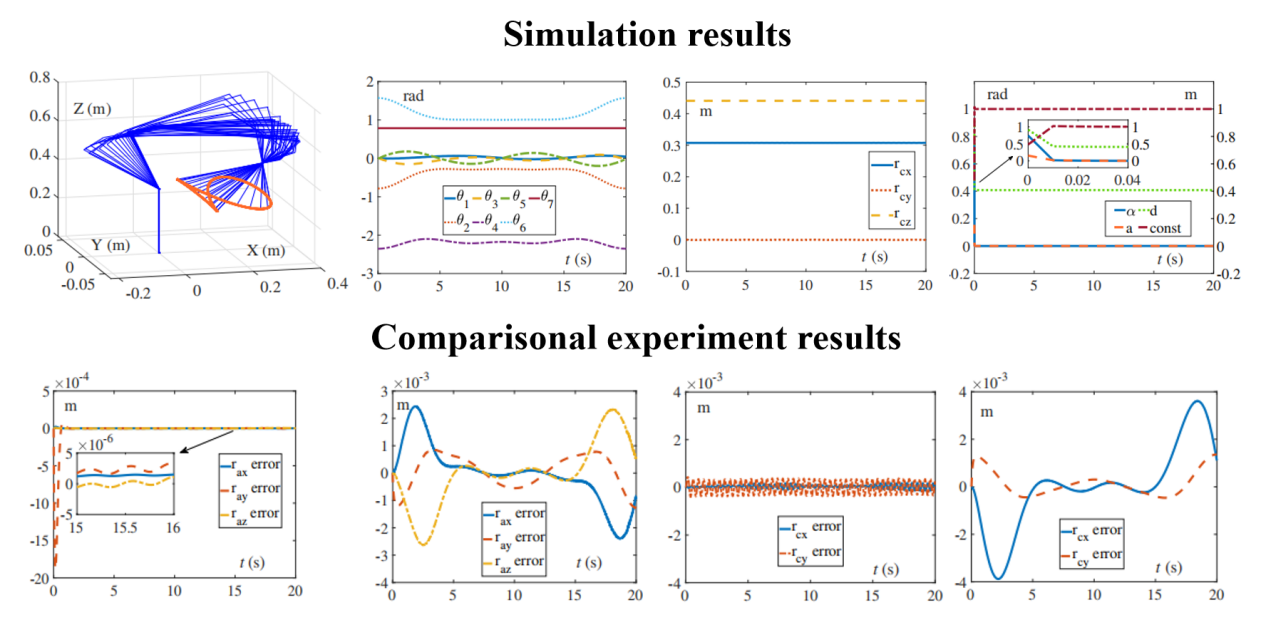
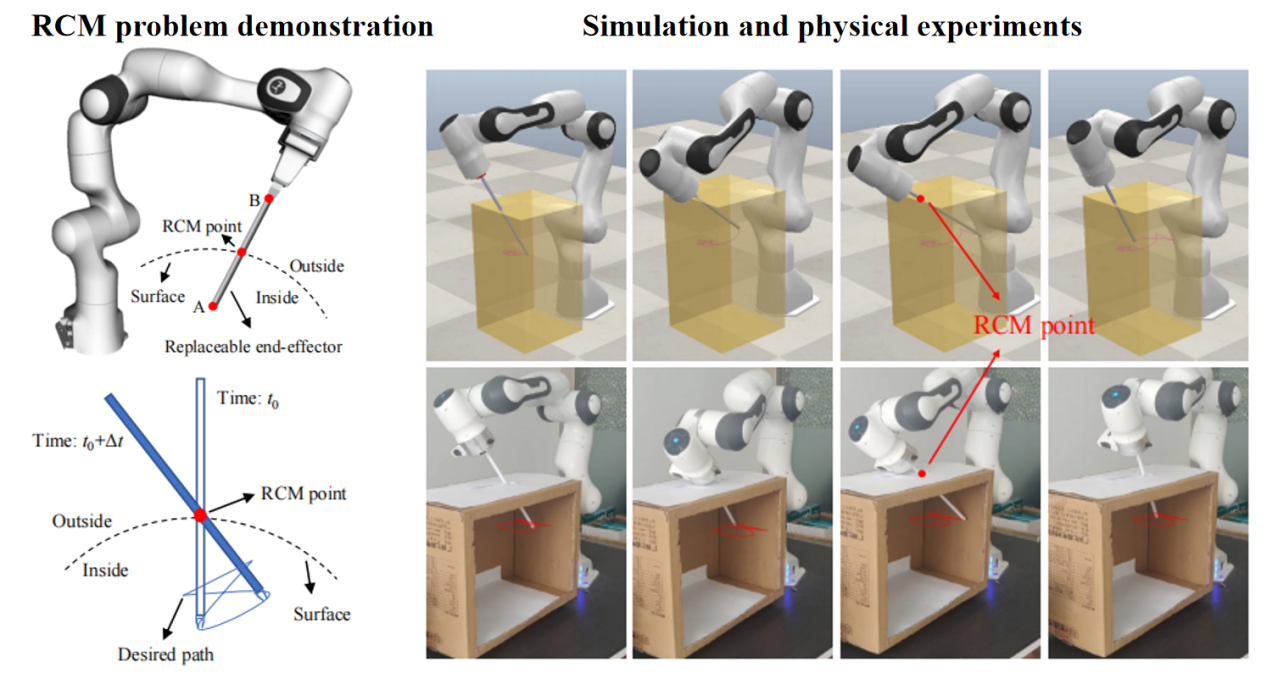
机器人在工业环境中面临着结构信息未知的挑战。强化学习方法在解决该挑战时存在试错成本大与训练速度慢等问题。取而代之,免试错方法的机器人学习技术正在不断发展。这些方法包括自适应在线学习算法和同步运动规划策略,通过利用数据驱动的学习算法和实时传感器数据,提升机器人的学习和决策能力。该工作面向结构信息不确定或者未知的具有额外的延长端的机器人开展相应的学习与规划,构建了适用于机器人的加速度级远运动中心规划方法,最终实现了对拥有可操作末端机器人的鲁棒规划及对其结构信息的实时学习,为低成本、改装类或受磨损情况下的机器人高精度规划提供解决方案。
该团队近年来致力于机器人系统的学习与规划算法的研究,并主持了中国电子学会-腾讯Robotics X犀牛鸟专项研究计划项目,同腾讯Robotics X实验室展开合作,在机器人学习与规划领域取得一定成果,并联合培养多名机器人领域研究生。

ICRA会议作为机器人领域最有影响力的国际学术会议,收录论文包括多场景机器人、控制与优化、定位与地图等十五个研究方向,汇集了全球顶尖高校、科研机构及创新企业的人才,共同探讨最新的创新和突破,强调机器人和自动化在应对全球挑战中的作用。本次ICRA会议将于2024年5月13日-17日在日本横滨举办。
